






In future, sea mines are to be detected and identified in a fully automated process. Joint trials between WTD 71 and Atlas Elektronik demonstrate the potential.
In September 2021, the Wehrtechnische Dienststelle für Schiffe und Marinewaffen, Maritime Technologie und Forschung (WTD 71) took part in the REP(MUS) trials (Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems) off the Portuguese coast. As part of these trials, investigations were carried out in the areas of underwater communication and mine defence.
The future of maritime naval warfare will increasingly rely on unmanned systems that operate as autonomously as possible - both above and below water. Special attention is being paid to sea mine defence. The business units 410 "New Technologies and Procedures, Asymmetric Warfare" and 430 "Centre for Naval Mine Countermeasures" of WTD 71 therefore focus jointly on testing autonomous underwater reconnaissance. Together with the company Atlas Elektronik, initial results have been achieved and demonstrated internationally in the course of the trials.
The aim of the project was to automate the process of reconnaissance of a sea minefield. In addition, a stable communication link was to be established from the underwater vehicles to the carrier platform, the research vessel PLANET, via the small watercraft test carrier mine defence (Etma) in order to reliably transmit control commands, system messages and sensor data. The conceptual structure of such an automated reconnaissance chain is as follows: Detection, classification and identification.
In a large-scale search, all underwater objects that could be mines are first identified. This search is carried out by an autonomous underwater vehicle (AUV) using side-scan sonar.

The identified underwater objects must be classified in the second step. Not every object found is a mine. Filtering the data is a computationally intensive operation that is carried out on board the underwater vehicle using automatic target recognition (ATR) software. Following this classification, only so-called points of interest (POI) remain from the detected objects, which appear likely to be mines based on the available data.
In order to definitively identify the remaining objects, the POIs, as mines or harmless objects, further data must be collected. This task is carried out by additional underwater vehicles, which scan the potential mines in a practical and efficient sequence. These underwater vehicles, equipped with more detailed sensor technology, transmit the data to a mine defence unit. The data obtained, such as photographic images, 3D sonar images or magnetic field measurements, are analysed there at a safe distance by trained personnel. If a mine find is confirmed in this way, appropriate mine countermeasures can then be carried out, such as the deployment of the "Seefuchs" mine destruction drone.
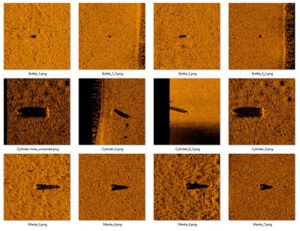
with side-view sonar, photo: Bw
WTD 71 has two SeaCat AUVs at its disposal for the realisation of such a reconnaissance chain consisting of detection, classification and identification. One of the underwater vehicles uses side-scan sonar to perform the detection function and then the classification. The prototype version of ATR software from Atlas Maridan, a Danish subsidiary of the German company, was used for classification. The second AUV receives the positions of the POIs found via an acoustic modem and carries out the data acquisition for identification with its sensors.
In order to monitor the underwater vehicles during this reconnaissance mission, they are accompanied into the mission area by the mine defence test vehicle. The Etma acts as a relay station between the mother ship, the PLANET, and the AUVs. For this purpose, underwater modems are used for underwater communication and non-directional W-LAN antennas for surface communication.
The practice
So much for the grey theory. Now let's summarise the practical experience gained during the REPMUS trials. The work for the crew of the PLANET research vessel, the test personnel on board and the company representatives who travelled with them began even before the actual trials. Adjustments and preliminary tests had to be carried out to ensure that the trials ran as smoothly and reproducibly as possible. For example, the trim of the underwater vehicles had to be adapted to the local salinity of the Atlantic. The salinity of the water has a decisive influence on the buoyancy of a body. The rest of the equipment also had to be tested and adjusted.
The preliminary tests and preparations were carried out successfully, including the establishment and maintenance of a stable communication link between the relay station and the research vessel. The two underwater vehicles could also be remotely controlled and monitored in the same configuration.
With the system fully configured, the actual trials could begin. Near the city of Sesimbra, the organisers of the Portuguese navy marked out a total of five areas for the international participants' mine defence trials. These areas varied in size from 500,000 to 900,000 square metres. Various training objects such as ground mines, sonar targets and decoys were positioned in each area so that realistic targets could be detected in addition to natural objects.
WTD 71 was scheduled to test a different area each day in order to cover as wide a range of different scenarios as possible and to test the reconnaissance chain described above. During one of the first combined missions, the Doppler sensor on the second vehicle failed. This sensor measures the height and speed above the seabed and is therefore essential for correct navigation and, above all, for the precise overruns of the objects being searched for. The failure could not be rectified on site, which made it impossible to use the second vehicle during the following days.
However, failures are also important in such trials. They reveal weaknesses in the systems or the test setup. In this case, it became clear from the perspective of WTD 71 that the AUVs available to date are not yet reliable enough under the given mine defence conditions, such as rough seas and long, uninterrupted deployments, and involve high maintenance costs. The need for a sufficient reserve of AUVs or at least the corresponding spare parts in a later operational deployment is undisputed from an engineering perspective.
Nevertheless, the tests were able to continue. The SeaCat AUVs used are multi-sensor platforms in which the payload - in this case the additional sensors - is mounted using an interchangeable head. This means that the reel-related equipment can be converted to the other AUV in just a few simple steps. Results for co-operative underwater reconnaissance, i.e. the transfer of POIs and the subsequent detection by a second vehicle, could no longer be obtained due to the above-mentioned failure of one unit. However, the individual functions of the reconnaissance chain could be replicated sequentially by the remaining vehicle.
In concrete terms, this means that objects were first successfully detected and then classified by the installed ATR software almost in real time. The different geometries of the target objects and other interfering objects in the test area, including large stones and lost lobster pots, placed considerable demands on the ATR algorithm. Overall, valuable insights were gained during the test runs of the ATR software. In addition, the database for underwater objects has been significantly expanded, which will enable further optimisation of pre-identification in the future. As development progresses, the results in this area can be significantly improved in the future.
The subsequent identification missions also delivered promising results. High-precision images of ground mines, decoys and other objects were automatically created by the automatic control of the underwater vehicle without any intervention or the need for an operator. A few objects could not be relocalised by the AUV, meaning that development potential could also be identified in the sensor technology and POI control.

REP(MUS) extensively tested, photo: Bw
In summary, it can be said that the main objectives of this research cruise were achieved and many of the individual steps of a remote, automatically operating underwater reconnaissance in mine defence were successfully carried out.
During the REP(MUS) trials in 2021, the autonomous function chain that was designed was not yet fully developed technologically for military use in the near future. However, the proven general feasibility brings this capability within reach for future procurement projects of the German Navy.
The fields of action recognised through the trial
- Improvement of ATR algorithms and processes,
- Optimisation of cooperative behaviour and especially
- improving the system reliability of AUVs
set the framework for further development work. In future, these tasks will have to be solved using both proven mechanical solutions from maritime technology and shipbuilding as well as innovative approaches, for example by using artificial intelligence methods and local reachback procedures, i.e. ATR calculations outside the AUV, in the area of ATR and cooperation.
The considerable knowledge and experience gained is one of the many reasons why WTD 71 intends to take part in the trials in Portugal again in the coming years. To this end, the existing system will not only be made more reliable, but also expanded. The advances made in recent years - particularly in sensor technology - are far from being fully utilised by the system described. WTD 71 is trialling further interchangeable heads for the AUV SeaCat that go beyond the use of optical cameras and sonar applications. For example, an electrochemical sensor that is capable of detecting the smallest traces of explosives in the water.
Technical government inspector Thiemo Wernik is a member of the Defence Technical Service 71 in Eckernförde.
Thiemo Wernik


