







Zukünftig sollen Seeminen in einem vollautomatischen Prozess entdeckt und identifiziert werden. Gemeinsame Versuche der WTD 71 mit Atlas Elektronik zeigen das Potenzial auf.
Im September 2021 nahm die Wehrtechnische Dienststelle für Schiffe und Marinewaffen, Maritime Technologie und Forschung (WTD 71) an den REP(MUS)-Trials (Robotic Experimentation and Prototyping Augmented by Maritime Unmanned Systems) vor der portugiesischen Küste teil. Im Rahmen dieser Versuche wurden Untersuchungen in den Bereichen der Unterwasserkommunikation und der Minenabwehr durchgeführt.
Die Zukunft des maritimen Seekriegs stützt sich verstärkt auf unbemannte und möglichst autonom agierende Systeme – sowohl Über- als auch Unterwasser. Dabei liegt ein besonderes Augenmerk auf der Seeminenabwehr. Die Geschäftsfelder 410 „Neue Technologien und Verfahren, Asymmetric Warfare‘“ und 430 „Zentrum für Seeminenabwehr“ der WTD 71 legen daher einen gemeinsamen Fokus auf Erprobungen der autonomen Unterwasseraufklärung. Zusammen mit der Firma Atlas Elektronik konnten im Zuge der Versuche erste Ergebnisse im internationalen Rahmen erzielt und demonstriert werden.


Ziel des Vorhabens war es, den Prozess der Aufklärung eines Seeminenfeldes zu automatisieren. Zusätzlich sollte eine stabile Kommunikationsverbindung von den Unterwasserfahrzeugen über das Kleinwasserfahrzeug Erprobungsträger Minenabwehr (Etma) zur Trägerplattform, dem Forschungsschiff PLANET etabliert werden, um Steuerungsbefehle, Systemmeldungen und Sensordaten zuverlässig zu übertragen. Der konzeptionelle Aufbau einer solchen automatisierten Aufklärungskette ist wie folgt: Detektion, Klassifikation und Identifikation.
In einer großflächigen Suche werden zunächst all jene Unterwasserobjekte, die Minen sein könnten, ermittelt. Durchgeführt wird diese Suche durch ein autonomes Unterwasserfahrzeug (AUV) mittels Seitensichtsonar.

Die ermittelten Unterwasserobjekte sind im zweiten Schritt zu klassifizieren. Nicht jedes gefundene Objekt ist eine Mine. Die Filterung der Daten ist eine rechenintensive Operation, die an Bord des Unterwasserfahrzeuges durch sogenannte Automatic-Target-Recognition-Software (ATR) durchgeführt wird. Im Anschluss an diese Klassifizierung bleiben von den entdeckten Objekten nur sogenannte points of interest (POI) über, bei denen es aufgrund der vorhandenen Daten wahrscheinlich erscheint, dass es sich um Minen handelt.
Um die verbliebenen Objekte, die POIs, nun endgültig als Minen oder harmlose Objekte identifizieren zu können, müssen weitere Daten gesammelt werden. Diese Aufgabe wird von weiteren Unterwasserfahrzeugen wahrgenommen, die die potenziellen Minen in einer zweckmäßigen und effizienten Reihenfolge abfahren. Diese mit detaillierterer Sensortechnik ausgestatteten Unterwasserfahrzeuge übermitteln die Daten an eine Minenabwehreinheit. Die gewonnenen Daten, wie fotografische Aufnahmen, 3-D-Sonaraufnahmen oder Magnetfeldmesswerte, werden dort in sicherer Entfernung von geschultem Personal ausgewertet. Bestätigt sich so ein Minenfund, können anschließend passende Maßnahmen zur Minenbekämpfung, wie der Einsatz der Minenvernichtungsdrohne „Seefuchs“, durchgeführt werden.
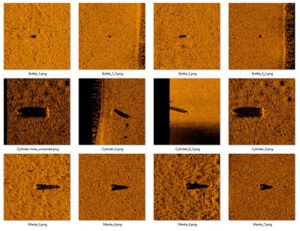
mit Seitensichtsonar, Foto: Bw
Für die Umsetzung einer solchen Aufklärungskette aus Detektion, Klassifikation und Identifikation stehen der WTD 71 zwei AUVs des Typs SeaCat zur Verfügung. Eines der Unterwasserfahrzeuge übernimmt hierbei mittels Seitensichtsonar die Funktion der Detektion und im Anschluss die Klassifikation. Zur Klassifikation wurde die Prototypversion einer ATR-Software der Firma Atlas Maridan, einer dänischen Tochter des deutschen Konzerns, genutzt. Das zweite AUV erhält über ein Akustikmodem die Positionen der gefundenen POIs und führt die Datenerfassung zur Identifikation mit seinen Sensoren aus.
Um die Unterwasserfahrzeuge während dieser Aufklärungsmission zu überwachen, werden sie vom Erprobungsträger Minenabwehr in das Missionsgebiet begleitet. Der Etma stellt dort eine Relaisstation zwischen dem Mutterschiff, der PLANET, und den AUVs dar. Dazu werden Unterwassermodems für die Unterwasser- und ungerichtete W-LAN-Antennen für die Überwasserkommunikation genutzt.
Die Praxis
So viel zur grauen Theorie. Nun zu einer Zusammenfassung der praktischen Erfahrungen im Rahmen der REPMUS Trials. Die Arbeit für die Besatzung des Forschungsschiffes PLANET, das eingeschiffte Erprobungspersonal und die mitgereisten Firmenvertreter begann bereits vor den eigentlichen Erprobungen. Einstellungen und Vorversuche mussten durchgeführt werden, um eine möglichst reibungslose und reproduzierbare Erprobung zu gewährleisten. Beispielsweise musste die Trimmung der Unterwasserfahrzeuge auf den lokalen Salzgehalt des Atlantiks angepasst werden. Der Salzgehalt des Wassers beeinflusst entscheidend den Auftrieb eines Körpers. Auch der Rest des Equipments musste getestet und justiert werden.
Die Vorversuche und Vorbereitungen wurden erfolgreich durchgeführt, unter anderem konnte eine stabile Kommunikationsverbindung zwischen Relaisstation und Forschungsschiff hergestellt und aufrechterhalten werden. In gleicher Konfiguration konnten auch die beiden Unterwasserfahrzeuge ferngesteuert und fernüberwacht werden.
Mit dem fertig konfigurierten System konnten die eigentlichen Versuche beginnen. In der Nähe der Stadt Sesimbra steckten die Organisatoren der portugiesischen Marine insgesamt fünf Areale für die Minenabwehrversuche der internationalen Teilnehmer ab. Diese Flächen variierten dabei in ihrer Größe von 500 000 bis 900 000 Quadratmeter. In ihnen wurden jeweils verschiedene Übungsobjekte wie Grundminen, Sonarziele und Täuschkörper positioniert, sodass neben den natürlichen Objekten auch realitätsgetreue Ziele detektiert werden konnten.
Für die Erprobung der WTD 71 war jeden Tag ein anderes Areal vorgesehen, um ein möglichst breites Spektrum an verschiedenen Szenarien abzudecken und die oben beschriebene Aufklärungskette zu erproben. Bei einer der ersten kombinierten Missionen kam es zu einem Ausfall des Doppler-Sensors am zweiten Fahrzeug. Dieser Sensor misst die Höhe und Geschwindigkeit über dem Meeresgrund und ist somit essenziell notwendig für korrekte Navigation und vor allem für die genauen Überläufe der gesuchten Objekte. Der Ausfall konnte vor Ort nicht behoben werden, was den Einsatz des zweiten Fahrzeugs während der folgenden Tage unmöglich machte.
Bei einer solchen Erprobung sind aber auch die Misserfolge von Bedeutung. Sie offenbaren Schwachstellen der Systeme oder des Versuchsaufbaus. In diesem Fall wurde aus Sicht der WTD 71 deutlich, dass die bisher verfügbaren AUVs unter den gegebenen Bedingungen der Minenabwehr, wie etwa rauer Seegang und lange, ununterbrochene Einsätze, noch nicht zuverlässig genug sind und einen hohen Wartungsaufwand mit sich bringen. Die Notwendigkeit einer ausreichenden Reserve von AUVs oder zumindest der entsprechenden Ersatzteile in einem späteren operativen Einsatz ist aus Ingenieurssicht unstrittig.
Dennoch konnten die Versuche fortgeführt werden. Bei den verwendeten AUVsdes Typs SeaCat handelt es sich um Multisensorplattformen, bei denen die Payload – also in diesem Fall die zusätzliche Sensorik – über einen Wechselkopf montiert wird. Mit nur wenigen Handgriffen lässt sich so die rollenbezogene Ausstattung auf das andere AUV umbauen. Ergebnisse zur kooperativen Unterwasseraufklärung, also der Übergabe der POIs und die darauffolgende Findung durch ein zweites Fahrzeug, konnten aufgrund des oben erwähnten Ausfalls einer Einheit nicht mehr gewonnen werden. Die einzelnen Funktionen der Aufklärungskette konnten jedoch sequenziell durch das verbliebene Fahrzeug nachgebildet werden.
Konkret heißt das, dass zunächst erfolgreich Objekte detektiert und diese nahezu in Echtzeit von der installierten ATR-Software auch klassifiziert wurden. Die verschiedenen Geometrien der Zielobjekte und anderer Störobjekte im Versuchsgebiet, darunter große Steine und verlorene Hummerkörbe, forderten den ATR-Algorithmus erheblich. Insgesamt konnten bei den Versuchsläufen der ATR-Software wertvolle Erkenntnisse gewonnen werden. Zusätzlich konnte die Datenbasis für Unterwasserobjekte erheblich erweitert werden, wodurch die Voridentifikation zukünftig weiter optimiert werden kann. Mit dem Voranschreiten der Entwicklung können die Ergebnisse in diesem Bereich zukünftig wesentlich verbessert werden.
Auch die anschließenden Identifikationsmissionen lieferten vielversprechende Ergebnisse. Es konnten dabei hochpräzise Aufnahmen von Grundminen, Täuschkörpern und anderen Objekten durch die automatische Steuerung des Unterwasserfahrzeugs, ohne einen Eingriff oder die Notwendigkeit eines Bedieners, automatisiert erstellt werden. Einige wenige Objekte konnten durch das AUV nicht relokalisiert werden, sodass auch bei der Sensorik und POI-Ansteuerung noch Entwicklungspotenzial identifiziert werden konnte.

REP(MUS) ausgiebig getestet, Foto: Bw
Zusammenfassend lässt sich festhalten, dass die wesentlichen Ziele dieser Forschungsfahrt erreicht wurden und viele der einzelnen Schritte einer abgesetzten, automatisch agierenden Unterwasseraufklärung in der Minenabwehr erfolgreich durchgeführt werden konnten.
Die konzipierte autonome Funktionskette zeigte sich bei den REP(MUS)-Trials 2021 technologisch insgesamt noch nicht vollends für einen zeitnahen, militärischen Einsatz ausgereift. Doch die bewiesene generelle Machbarkeit bringt diese Fähigkeit in greifbare Nähe für zukünftige Beschaffungsvorhaben der Deutschen Marine.
Die durch die Erprobung erkannten Handlungsfelder
• Verbesserung der ATR-Algorithmen und -Prozesse,
• Optimierung des Kooperativen Verhaltens und besonders
• die Verbesserung der Systemzuverlässigkeit von AUVs
setzen den Rahmen der weiteren Entwicklungsarbeit. Diese Aufgaben müssen künftig sowohl durch bewährte mechanische Lösungen aus der maritimen Technik und dem Schiffbau als auch durch innovative Ansätze gelöst werden, beispielsweise durch die Verwendung von Methoden der künstlichen Intelligenz und lokaler Reachback-Verfahren, also Berechnungen der ATR außerhalb des AUVs, im Bereich ATR und Kooperation.
Der erhebliche Erkenntnis- und Erfahrungsgewinn ist einer der vielen Gründe, warum die WTD 71 beabsichtigt, auch in den folgenden Jahren erneut an den Versuchen in Portugal teilzunehmen. Hierfür soll das bestehende System nicht nur zuverlässiger gemacht, sondern auch erweitert werden. Die Fortschritte der letzten Jahre – insbesondere in der Sensortechnik – werden durch das beschriebene System noch lange nicht ausgeschöpft. Die WTD 71 erprobt weitere Wechselköpfe für das AUV SeaCat, die über die Nutzung von optischen Kameras und Sonaranwendungen hinausgehen. Beispielsweise einen elektrochemischen Sensor, der in der Lage ist, kleinste Spuren von Sprengstoffen im Wasser aufzuspüren.
Technischer Regierungsoberinspektor Thiemo Wernik ist Angehöriger der Wehrtechnischen Dienststelle 71 in Eckernförde.
Thiemo Wernik
